
1. Enkonduko de cirkla trikmaŝina teknologio
1. Mallonga enkonduko de cirkla trikmaŝino
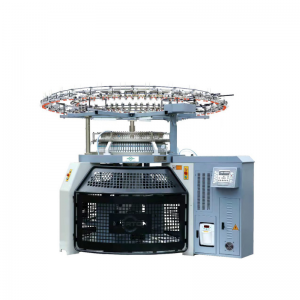
La cirkla trikmaŝino (kiel montrite en Figuro 1) estas aparato, kiu teksas kotonan fadenon en tubforman ŝtofon. Ĝi estas ĉefe uzata por triki diversajn specojn de reliefaj trikaĵoj, T-ĉemizajn ŝtofojn, diversajn truajn strukturajn ŝtofojn, ktp. Laŭ la strukturo, ĝi povas esti dividita en unu-ĵerseajn cirklajn trikmaŝinojn kaj duobl-ĵerseajn cirklajn trikmaŝinojn, kiuj estas vaste uzataj en la tekstila industrio.
 2. Procezaj postuloj
2. Procezaj postuloj
(1) La invetilo devas havi fortan median reziston, ĉar la temperaturo de la surloka labormedio estas relative alta, kaj vato povas facile kaŭzi halton kaj difekton de la malvarmiga ventumilo, kaj blokadon de la malvarmigaj truoj.
(2) Fleksebla funkcio de rampado estas necesa. Rampaj butonoj estas instalitaj en multaj lokoj de la ekipaĵo, kaj la inversigilo devas respondi rapide.
(3) Estas tri rapidoj bezonataj por rapidregado. Unu estas la rampado, kutime ĉirkaŭ 6Hz; la alia estas la normala teksadrapido, kun la plej alta frekvenco ĝis 70Hz; la tria estas la malrapida kuntirado, kiu postulas frekvencon de ĉirkaŭ 20Hz.
(4) Dum la funkciado de la cirkla trikmaŝino, la inversigo kaj rotacio de la motoro estas absolute malpermesitaj, alie la nadloj de la nadlolito fleksiĝos aŭ rompiĝos. Se la cirkla trikmaŝino uzas unufazan lagron, tio ne estos konsiderata. Se la sistemo rotacias antaŭen kaj malantaŭen, ĝi tute dependas de la antaŭen kaj malantaŭen rotacio de la motoro. Unuflanke, ĝi devas povi malpermesi inversan rotacion, kaj aliflanke, ĝi devas agordi kontinukurentan bremsadon por forigi rotacion.
3. Postuloj pri plenumo
Dum teksado, la ŝarĝo estas peza, kaj la enŝovado/startiga procezo devas esti rapida, kio postulas, ke la invertilo havu malaltan frekvencon, grandan tordmomanton kaj rapidan respondrapidon. La frekvenckonvertilo uzas vektoran kontrolreĝimon por plibonigi la precizecon de rapidstabiligo de la motoro kaj la malaltfrekvencan tordmomantan eliron.
4. Kontrola drataro
La stirparto de la cirkla trikmaŝino uzas mikroregilon aŭ PLC + hom-maŝinan interfacan stiradon. La frekvenckonvertilo estas kontrolata per terminaloj por starti kaj haltigi, kaj la frekvenco estas donita per analoga kvanto aŭ plurŝtupa frekvenca agordo.
Ekzistas baze du stirskemoj por plurrapida stirado. Unu estas uzi analogan sistemon por agordi la frekvencon. Ĉu temas pri trotado aŭ altrapida kaj malalta rapido, la analoga signalo kaj funkciigaj instrukcioj estas donitaj de la stirsistemo; la alia estas uzi frekvenckonvertilon. La enkonstruita plurŝtupa frekvenca agordo, la stirsistemo donas plurŝtupan frekvencan ŝaltilsignalon, la trotado estas provizita de la inversigilo mem, kaj la altrapida teksa frekvenco estas donita per analoga kvanto aŭ cifereca agordo de la inversigilo.
2. Surlokaj postuloj kaj komisiadplano
(1) Surlokaj postuloj
La industrio de cirklaj trikmaŝinoj havas relative simplajn postulojn por la stirfunkcio de la invetilo. Ĝenerale, ĝi estas konektita al terminaloj por kontroli la komencon kaj halton, analoga frekvenco estas donita, aŭ plurrapida funkcio estas uzata por agordi la frekvencon. Postulante rapidan aŭ malrapidan funkciadon, la invetilo devas regi la motoron por generi grandan malaltfrekvencan tordmomanton je malalta frekvenco. Ĝenerale, en la apliko de cirklaj trikmaŝinoj, la V/F-reĝimo de la frekvenckonvertilo sufiĉas.
(2) Sencimiga skemo La skemo, kiun ni adoptas, estas: C320-serio sensensila kurentvektora invetilo Povumo: 3,7 kaj 5,5 kW
3. Sencimigaj parametroj kaj instrukcioj
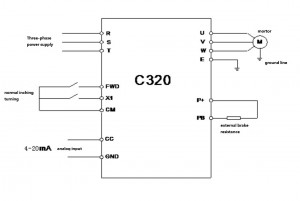
1. Dratara diagramo
2. Sencimigi parametrojn
(1) F0.0=0 VF-reĝimo
(2) F0.1=6 frekvenca eniga kanalo ekstera kurenta signalo
(3) F0.4=0001 Ekstera fina kontrolo
(4) F0.6=0010 inversa rotacia prevento validas
(5) F0.10=5 akceltempo 5S
(6) F0.11=0.8 malakceliĝotempo 0.8S
(7) F0.16=6 portanta frekvenco 6K
(8) F1.1=4 Tordmomanta akcelo 4
(9) F3.0=6 Agordu X1 al antaŭenpuŝo
(10) F4.10=6 agordas la jog-frekvencon al 6Hz
(11) F4.21=3.5 Agordu la akceltempon de la movorapido al 3.5S
(12) F4.22=1.5 agordas la malakceltempon de la movorapido al 1.5S
Sencimigaj Notoj
(1) Unue, movu la motoron trote por determini la direkton.
(2) Rilate al la problemoj de vibrado kaj malrapida respondo dum trotado, la akcelo- kaj malakcelo-tempo de trotado devas esti adaptita laŭ la bezonoj.
(3) Malaltfrekvenca tordmomanto povas esti plibonigita per agordo de la portondo kaj tordmomanta akcelo.
(4) Vato blokas la aerdukton kaj la ventolilo haltas, kaŭzante malbonan varmodisradiadon de la inversigilo. Ĉi tiu situacio okazas ofte. Nuntempe, la ĝenerala inversigilo preterlasas la termikan alarmon kaj poste permane forigas la lanugaĵojn en la aerdukto antaŭ ol daŭrigi uzi ĝin.
Afiŝtempo: 8 septembro 2023